
M2BAX180MLB4 B3 22KW(3GBA182420-ADCCN)
M2BAX250SMA4 B3 55KW + VC376
M2BAX180MLA4 B3 18.5KW + VC376
M2BAX80MB4 B5 0.75KW
M2BAX132SB2 B3 7.5KW
M2BAX280SMB4 V1 Stator dengan PTC dengan port pengisian bahan bakar
M2BAX90LA4 B5 1.5KW
M2BAX132SA4 B5 5.5KW+VC209+VC376
M2BAX80MA6 B5 0.37KW+VC209+VC376
M2BAX250SMA4 B3 55KW
M2BAX280SA4 B3 75KW + VC376
M2BAX100LB4 B35 3KW+VC009
M2BAX225SMA4 B35 37KW+VC009
M2BAX132SB2 B5 7.5KW+VC209+VC002
M2BAX112MA4 B5 4KW+VC209+VC002
M2BAX160MLA4 B35 11KW+VC009
M2BAX180MLB4 B3 22KW+VC002
M2BAX315MLA4 B3 200KW+VC180
M2BAX100LA6 B5 1.5KW(3GBA103510-BSCCN)
M2BAX160MLA4 B3 11KW
M2BAX225SMA4 B3 37KW+VC002

M2BAX112MA6 B3 2.2KW
M2BAX71MA4 B34 0.25KW+VC008+VC540
M2BAX160MLB4 B3 15KW+VC002
M2BAX160MLB2 B3 15KW+VC002
M2BAX315SMA6 B3 75KW+VC002
M2BAX132MA4 B3 7.5KW+VC002
M2BAX180MLA2 B3 22KW+VC002
M2BAX315SMA4 B3 110KW+VC002
M2BAX315SMC4 B3 160KW+VC002
M2BAX160MLA4 B3 11KW+VC002
M2BAX200MLA6 B3 18.5KW+VC002
M2BAX180MLA4 B3 18.5KW+VC002
M2BAX160MLC2 B3 18.5KW+VC002
M2BAX132MA6 B3 4KW+VC002
M2BAX71MA2 B3 0.37KW
M2BAX71MA2 B5 0.37KW
M2BAX71MB2 B3 0.55KW
M2BAX180MLA6 B5 15KW
M2BAX225SMA4 B3 37KW
M2BAX112MA4 B3 4KW
M2BAX180MLA4 B3 18.5KW
M2BAX200MLA4 B5 30KW
M2BAX180MLB4 B5 22KW
M2BAX315MLA4 B3 200KW
M2BAX280SA4 B3 75KW
M2BAX132MA4 B5 7.5KW
M2BAX160MLB4 B5 15KW
M2BAX180MLA4 B5 18.5KW
M2BAX100LA4 B3 2.2KW
M2BAX100LB4 B3 3KW
M2BAX100LB4 B5 3KW
M2BAX112MA4 B5 4KW
M2BAX132SA4 B3 5.5KW
M2BAX80MB4 B3 0.75KW
M2BAX90LA4 B3 1.5KW
M2BAX90LA4 B5 1.5KW
M2BAX100LA4 B5 2.2KW
M2BAX160MLA4 B5 11KW
M2BAX160MLB4 B3 15KW
M2BAX100LA4 B5 2.2KW
M2BAX71MA4 B3 0.25KW
M2BAX90SA4 B3 1.1KW
M2BAX132MA4 B3 7.5KW
M2BAX225SMB4 B35 45KW
M2BAX225SMB4 B5 45KW
M2BAX225SMB4 B3 45KW
M2BAX132MA4 B35 7.5KW(3GBA132310-ADCCN)+VC009
M2BAX90SA4 B5 1.1KW
M2BAX80MA4 B3 0.55KW
M2BAX71MA4 B5 0.25KW
M2BAX132SA4 B5 5.5KW
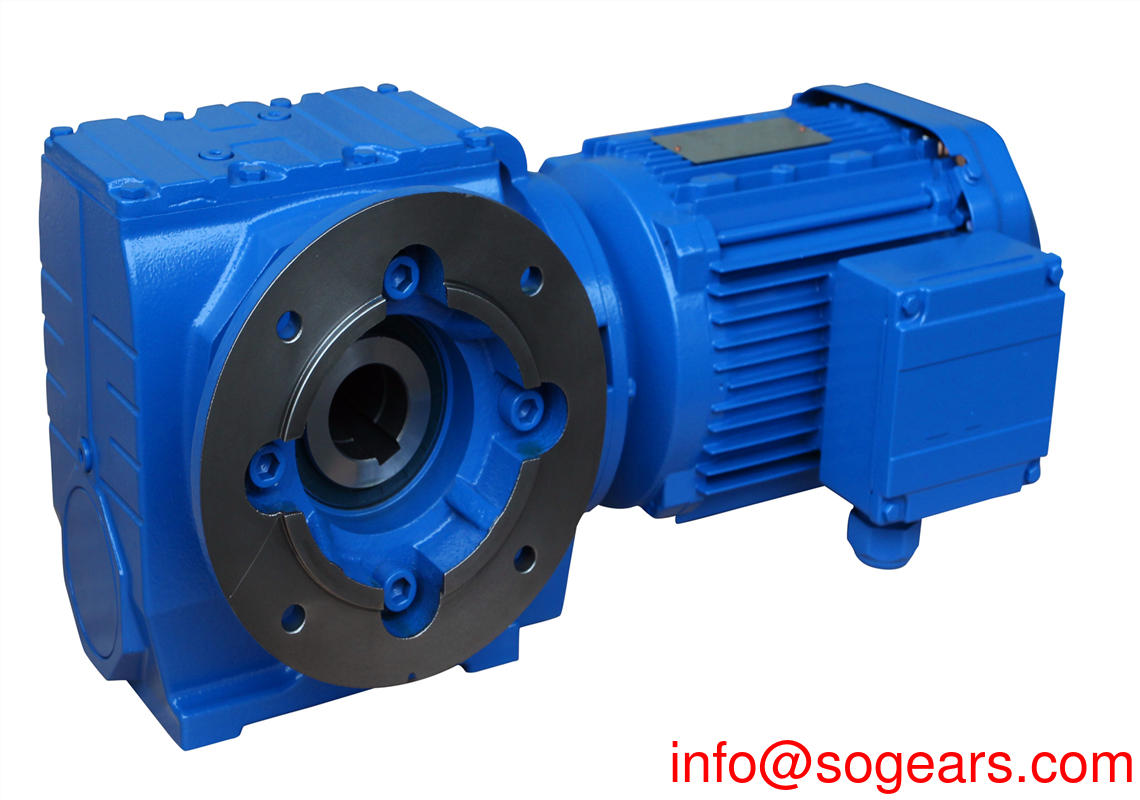
Output terukur Daya terukur motor seri MABAX mengacu pada motor yang beroperasi di bawah sistem operasi s1-kontinyu (IEC 60034-1), ketika suhu sekitar -20 ° c ~ 40 ° c dan ketinggian tidak melebihi 1000 m. Tegangan , frekuensi
Motor seri M2BAX diimpor bantalan NSK, bantalan merek SKF, semua motor di bantalan pengunci aksial standar d-end. Tingkat perlindungan desain produk IP55, dan memberikan kustomisasi IP56, IP65. Menyediakan hingga lusinan konfigurasi pemilihan kode variabel motor, sepenuhnya memenuhi penggunaan berbagai aplikasi. Motor umum motor ABB disebut motor proses seri M2BAX, yang setara dengan motor biasa di Cina. Dalam hal konsumsi energi, mereka adalah IE2 - setara dengan grade 3 dari standar konsumsi energi edisi 2012 di Cina, dan setara dengan motor seri YX3 dan YE2 di Cina.
IEC 60034-1 mendefinisikan efek kenaikan suhu pada tegangan dan frekuensi. Standar membagi perubahan gabungan dalam tegangan dan frekuensi menjadi zona A dan B. Area A adalah penyimpangan tegangan +/- 5% dan penyimpangan frekuensi +/- 2%; Area B untuk deviasi tegangan +/- 10% dan deviasi frekuensi +3% / - 5%.
Kedua motor dapat memberikan torsi pengenal di zona A dan B, tetapi kenaikan suhu akan lebih tinggi dari tegangan dan frekuensi pengenal. Motor hanya diperbolehkan berjalan untuk jangka pendek di zona B.
Motor tegangan rendah mengacu pada motor dengan tegangan pengenal di bawah 1000V.
Tegangan rendah yang disebut adalah merujuk ke tegangan ac di bawah 1000V, dan di sini kita mengatakan tegangan umum motor adalah 380V ac, atau 440V atau 660V dan beberapa kelas motor asinkron.
Motor asinkron relatif terhadap motor sinkron, rumus perhitungan kecepatan motor sinkron n = 60 f / p untuk frekuensi daya f, p untuk motor logaritma, tetapi ini adalah teori kecepatan rotasi, motor umum akan lebih baik untuk menghilangkan eksternal memaksa, membuat kecepatan motor yang sebenarnya lebih rendah dari rumus kecepatan motor di atas, yang dikenal sebagai motor. Artinya ada perbedaan di antara mereka, tidak sinkron!
Perlindungan dan kontrol TDHD menyediakan solusi perlindungan, kontrol, pengukuran, dan analisis untuk motor bertegangan rendah.
perlindungan hubung singkat
TDHD memberikan perlindungan arus berlebih untuk motor yang disebabkan oleh hubungan pendek antarfase. Perlindungan terdiri dari elemen arus lebih independen, yang masing-masing dapat dimulai secara terpisah, dan waktu tindakan dapat diatur sesuai dengan situasi spesifik di lokasi.
Perlindungan rotor terkunci
Dalam proses motor berjalan dengan elemen yang terlalu panas untuk memberikan perlindungan, dalam proses motor mulai dengan pengakuan otomatis dari perubahan saat ini untuk memberikan perlindungan, ini bisa menjadi waktu yang lama untuk memulai motor dan tidak memungkinkan proses pemblokiran waktu rotasi untuk memberikan kecepatan perlindungan. Jika penurunan saat ini tidak jelas selama proses awal motor, perlindungan pemblokiran akan dimulai, dan perlindungan pemblokiran juga dapat dikenali oleh perlindungan beban berlebih dan memberikan perlindungan.
Perlindungan yang berlebihan
Ketika kapasitas panas mencapai 100%, proteksi kelebihan beban trip. Kapasitas termal mengambil efek termal komprehensif dari arus urutan positif dan negatif dengan pertimbangan penuh, dan deteksi arus efektif sejati memastikan respons yang benar terhadap efek termal harmonik. Elemen perlindungan memberikan perlindungan kelebihan beban dengan batas waktu tetap dan batas waktu terbalik untuk memenuhi kebutuhan berbagai situs.
Perlindungan ketidakseimbangan fase saat ini
TDHD memonitor rasio ketidakseimbangan arus fasa motor. Jika ketidakseimbangan arus fasa lebih besar dari nilai alarm dan berlangsung selama lebih dari 5 detik, alarm akan dikeluarkan. Tripping terjadi jika ketidakseimbangan arus fasa lebih besar dari nilai tripping dan bertahan selama lebih dari 5 detik.
Di bawah perlindungan tegangan
Untuk beban yang sensitif terhadap tegangan (seperti motor induksi), penurunan voltase akan meningkatkan arus isap, yang dapat menyebabkan panas berlebih pada motor. Ketika tegangan turun ke nilai pengaturan tegangan preset, setelah waktu tunda yang ditentukan, perlindungan undervoltage akan mengeluarkan alarm atau perintah trip.
Atas perlindungan tegangan
Untuk motor yang berjalan di bawah beban konstan, tegangan lebih dapat menyebabkan arus turun. Namun, peningkatan kehilangan zat besi dan konsumsi tembaga akan menyebabkan motor memanas. Dalam hal ini, relai beban berlebih saat ini tidak akan beroperasi dan tidak akan memberikan perlindungan yang memadai, sehingga elemen beban berlebih ini akan memberikan perlindungan pada motor jika terjadi tegangan berlebih.

Perlindungan bumi / kebocoran
Nilai kesalahan tanah diukur sebagai persentase dari nilai CT primer. Deteksi arus ground berdasarkan skema CT urutan nol. Untuk mencegah alarm palsu yang disebabkan oleh arus masuk instan, penundaan waktu dapat diatur dalam fungsi ini. Fungsi perlindungan menyediakan alarm gangguan tanah atau gangguan perjalanan, yang dapat memberikan peringatan dini kerusakan isolasi.
Perlindungan untuk waktu startup yang terlalu lama
Perangkat secara otomatis mengidentifikasi proses awal motor. Jika motor tidak menyelesaikan awal dalam waktu mulai yang ditentukan, tindakan perlindungan akan diambil.
Undervoltage dimulai ulang secara otomatis
Ketika fungsi ini diaktifkan, setelah motor kehilangan daya dalam sekejap, ia mulai menghitung waktu dari mulai. Jika setelah aksi perlindungan tegangan rendah, tegangan dikembalikan ke lebih dari 90% dari tegangan pengenal sebelum waktu mulai otomatis yang ditetapkan, maka generator menutup perintah.
Mulai fungsi kontrol
TDHD dapat diterapkan ke mode startup berikut
■ mulai langsung
■ mulai dua arah
■ delta bintang dimulai
■ mulai autotransformer
■ fungsi power swing start
■ resistansi seri dimulai
Berpindah input
■ perangkat perlindungan motor memberikan input kuantitas switching 8 arah dan dapat diperluas hingga maksimum input kuantitas switching 11 arah
■ input optik, input simpul kering pasif
■ untuk memulai kontaktor atau stop / reset, lokal / jarak jauh, tautan proses dan tampilan status sakelar umum
■ panel kristal cair dengan indikator sakelar
Output relai
■ ekspansi maksimum untuk 5 output relai
■ kapasitas kontak: AC250V / 5A DC30V / 5A
■ untuk trip, alarm, start dan output jarak jauh
■ Panel LCD dengan indikasi pembukaan / penutupan relai
Editor sejarah pengembangan
Setelah berdirinya Republik Rakyat Tiongkok, tim teknologi perlindungan relay Tiongkok dari nol, dalam waktu sekitar 10 tahun dalam waktu setengah abad melalui jalan negara-negara maju.
Pelindung motor tegangan rendah
Pelindung motor bertegangan rendah (1 buah)
Pada tahun 1958, teknisi Tiongkok secara kreatif menyerap, mencerna, dan menguasai teknologi kinerja dan operasi peralatan perlindungan relay canggih asing, dan mendirikan pabrik relay profesional pertama - pabrik relay acheng, yang menandai kelahiran industri relay nasional China.
Pada 1960-an, Cina telah membangun sistem lengkap penelitian perlindungan estafet, desain, manufaktur, operasi dan pengajaran. Pada dasarnya untuk elektromagnetik, tipe perbaikan.
Dari pertengahan 1960-an hingga pertengahan 1980-an, perlindungan relay relay berkembang dan diadopsi.
Akhir 80-an dan awal 90-an. Perlindungan sirkuit terpadu telah membentuk seri lengkap, secara bertahap menggantikan perlindungan transistor.
Dari tahun 1990-an, teknologi perlindungan relay Cina telah memasuki era perlindungan komputer mikro. Pada tahun 1984, perangkat perlindungan komputer mikro untuk saluran transmisi yang dikembangkan oleh lembaga tenaga listrik China utara pertama kali dinilai. Perlindungan generator dan perlindungan grup transformator generator juga lulus penilaian berturut-turut pada tahun 1989 dan 1994.
Pada akhir 2006, tingkat mikro perangkat perlindungan relay 220kV dan sistem di atas adalah 91.41%.
Saat ini, pengembangan perlindungan relai domestik telah mencapai atau bahkan melampaui tingkat industri yang sama di negara-negara asing baik dalam teknologi perangkat keras dan perangkat lunak serta prinsip perlindungan.
Pada tahun 2006, tingkat tindakan yang benar dari perangkat perlindungan relai sistem ac perusahaan jaringan negara adalah 99.97%.
Dibandingkan dengan perlindungan komputer mikro jalur, perlindungan peralatan utama (bus, transformator, dll.), Meskipun dimulai terlambat, setelah bertahun-tahun penelitian telah membuat kemajuan yang memuaskan. Alasan utama untuk tindakan perlindungan komponen yang tidak stabil:
Prinsip perlindungan elemen dan perkabelan kompleks. Karena setiap sisi transformator bukan hubungan listrik yang sederhana, ada hubungan kopling magnetik, jadi bagaimana membedakan trafo arus magnetisasi dan arus gangguan adalah perlindungan transformator belum terlalu bagus pada prinsipnya untuk menyelesaikan masalah; Ada banyak peralatan terkait perlindungan bus, kabel rumit, tidak mudah diperbaiki, dan teknologi perlindungan bus terhadap saturasi transformator saat ini tidak terlalu matang.
(2) perlindungan komponen komputer mikro dari awal dan akhir, profesional perlindungan relay dan personel operasi karena perlindungan komponen komputer mikro yang akrab dengan dan gelar master tidak cukup, sedikit pengalaman dalam operasi pemeliharaan dan operasi banyak masalah.
(3) transformator kurang, waktu kesalahan bus, jumlah tindakan perlindungan komponen relatif kecil, sampel statistik kecil, tingkat tindakan yang benar dari statistik perlindungan komponen memiliki tingkat kontingensi dan keacakan tertentu.
Perlindungan dc China, hingga sekarang, sepuluh tahun beroperasi. Secara keseluruhan, kurva laju aksi yang benar sangat berfluktuasi. Alasan utama adalah: teknologi perlindungan dc diperkenalkan terlambat, jumlah aplikasi teknik kecil, teknologi perlindungan dc, tingkat operasi dan pemeliharaan tidak matang; Frekuensi tindakan perlindungan dc kurang, sampel statistik kurang, statistik data ada kontingensi tertentu.
perlindungan hubung singkat
■ memblokir perlindungan
■ perlindungan overload batas waktu tetap
■ membalikkan perlindungan kelebihan waktu
■ perlindungan fase saat ini tidak seimbang
■ perlindungan istirahat fase
■ di bawah perlindungan tegangan
■ perlindungan tegangan lebih
■ perlindungan dari tanah / kebocoran
Motor tegangan rendah
Motor tegangan rendah (1)
■ perlindungan untuk waktu startup yang terlalu lama
■ ayunkan daya untuk memulai
■ tautan proses
■ Perlindungan waktu
Pemantauan dan pengukuran
■ parameter operasi motor dan data historis
■ menjalankan data proses
■ menampilkan parameter listrik daya penuh
■ beralih status input kuantitas dan status output relay
■ informasi catatan acara
■ catatan pemeliharaan
komunikasi
■ antarmuka komunikasi rs485 / 232
■ protokol komunikasi modbus-rtu
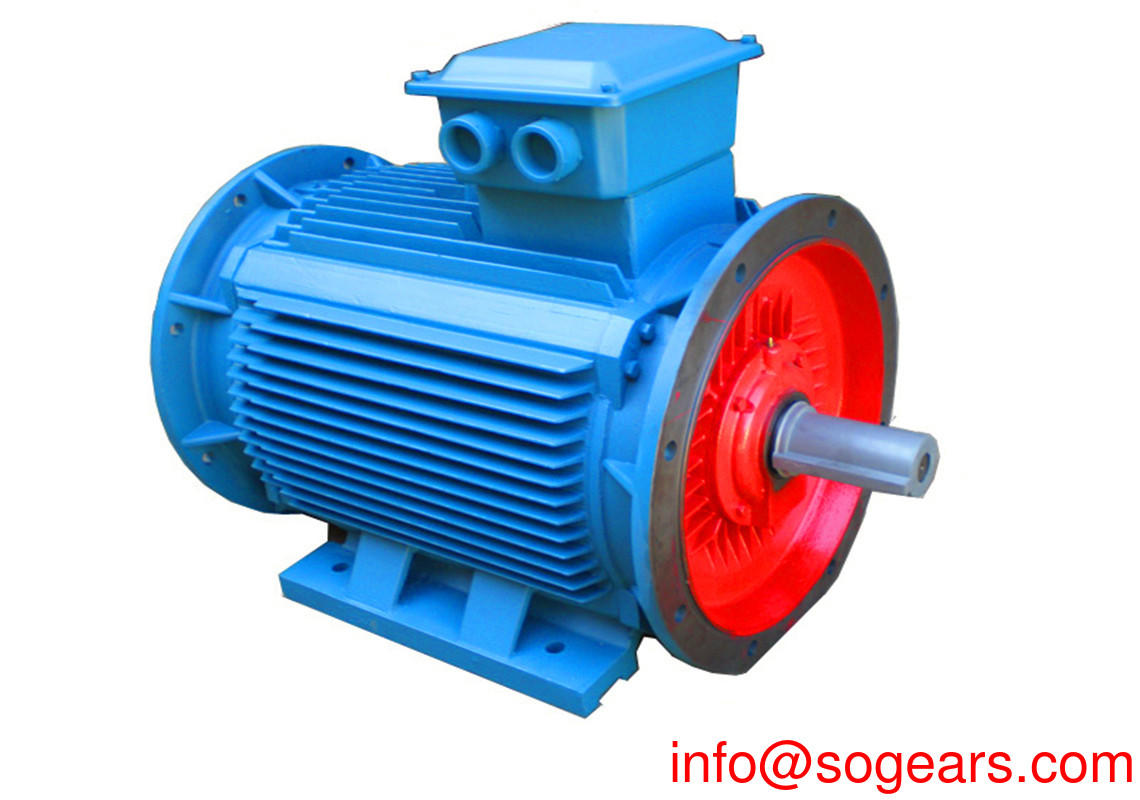
Motor tegangan rendah mengacu pada tegangan ac motor di bawah 1000V, umumnya mengacu pada motor ac 380V, 440V atau 660V dan kelas lain dari motor asinkron yang digunakan sebenarnya relatif sedikit. Motor tegangan rendah dibagi menjadi motor asinkron ac dan motor dc. Motor asinkron relatif terhadap motor sinkron. Rumus untuk menghitung kecepatan sinkron motor sinkron adalah n0 = 60f / p. F adalah frekuensi daya dan p adalah logaritma kutub motor. Keuntungan: 1. Struktur sederhana, operasi yang andal, aplikasi luas; 2. Manufaktur dan pemeliharaan yang nyaman; 3. Karakteristik kerja yang baik; 4. Biaya rendah. Kekurangan: 1. Terbatas oleh arus operasi, kapasitas tidak boleh terlalu besar; 2. Perlindungan motor umumnya relatif sederhana, mudah rusak; 3. Kapasitas besar motor tegangan rendah memiliki pengaruh besar pada sistem ketika dimulai.
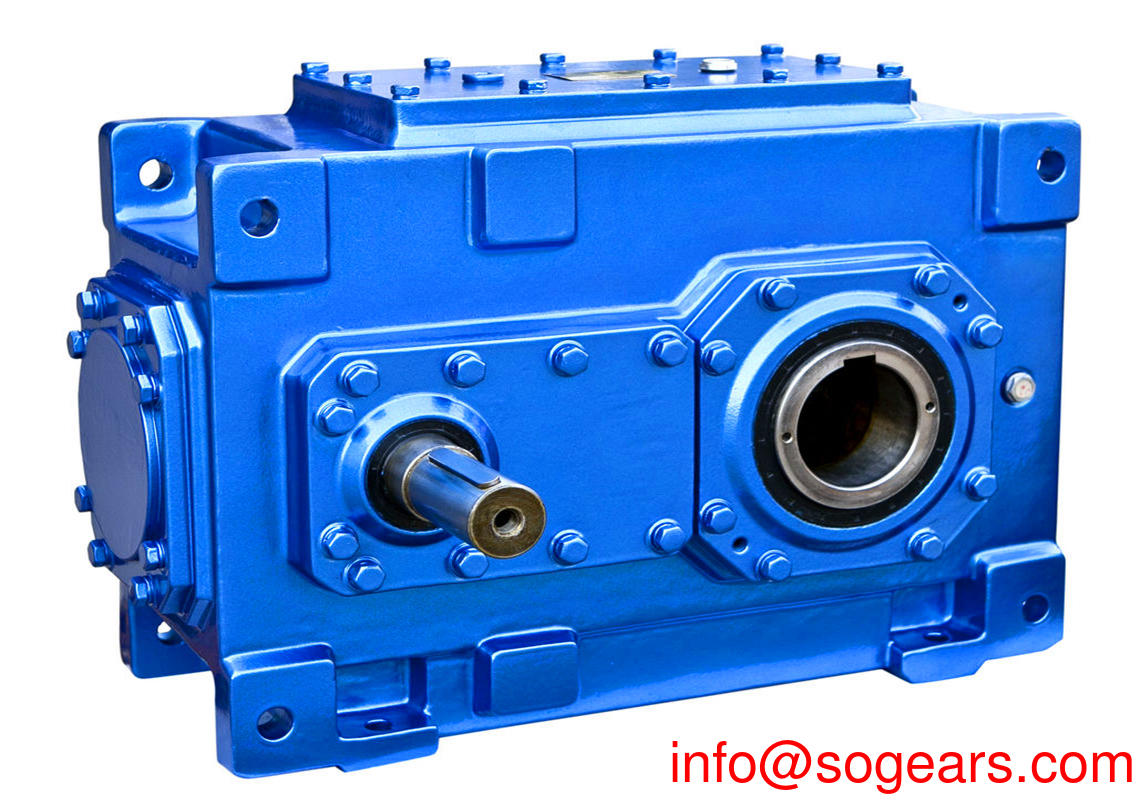
Motor tegangan tinggi mengacu pada motor dengan tegangan pengenal di atas 10000v. 6000V dan 10000v umumnya digunakan. Karena jaringan listrik yang berbeda di luar negeri, ada level tegangan 3300v dan 6600v. Motor bertegangan tinggi dapat digunakan untuk menggerakkan berbagai mesin. Inilah perbedaan antara motor tegangan tinggi dan motor tegangan rendah. Motor tegangan tinggi dan motor tegangan rendah memiliki kelebihan dan kekurangan. Apa kelebihan dan kekurangan mereka
Dibandingkan dengan motor bertegangan rendah, motor bertegangan tinggi memiliki kelebihan sebagai berikut:
1. Perpustakaan dapat meningkatkan kekuatan motor, yang dapat mencapai ribuan, bahkan puluhan ribu kilowatt. Ini karena, pada output daya yang sama, arus motor tegangan tinggi jauh lebih kecil daripada motor tegangan rendah. Sebagai contoh, arus pengenal 500kW, motor AC tiga fase 4-tahap sekitar 900A ketika tegangan pengenal 380V, dan hanya sekitar 30A ketika tegangan pengenal 10kV. Jadi belitan motor tegangan tinggi dapat menggunakan diameter kawat yang lebih kecil Oleh karena itu, kehilangan tembaga stator dari motor bertegangan tinggi lebih kecil dibandingkan dengan motor bertegangan rendah. Untuk motor berdaya tinggi, saat menggunakan daya bertegangan rendah, area slot stator yang lebih besar diperlukan karena kebutuhan konduktor yang lebih tebal, yang membuat diameter inti stator lebih besar dan volume seluruh motor lebih besar
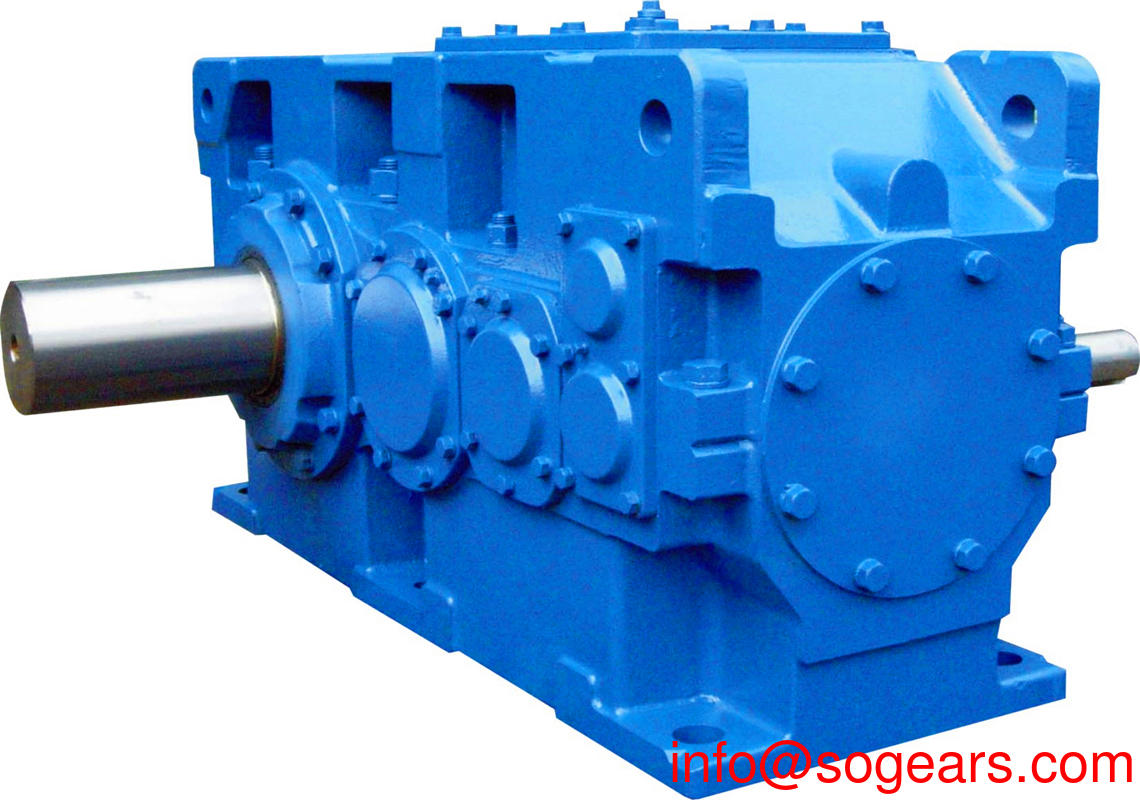
2. Untuk motor berkapasitas besar, catu daya dan peralatan distribusi yang digunakan oleh motor bertegangan tinggi kurang dari investasi keseluruhan dari motor bertegangan rendah, dan kehilangan saluran kecil, yang dapat menghemat konsumsi daya dalam jumlah tertentu. Secara khusus, 10kv Motor Bertegangan Tinggi dapat langsung menggunakan jaringan listrik, sehingga investasi dalam peralatan listrik akan menjadi lebih sedikit, penggunaannya akan menjadi sederhana, dan tingkat kegagalan akan menjadi lebih kecil.








































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}